-


-
-


WhatsAPP


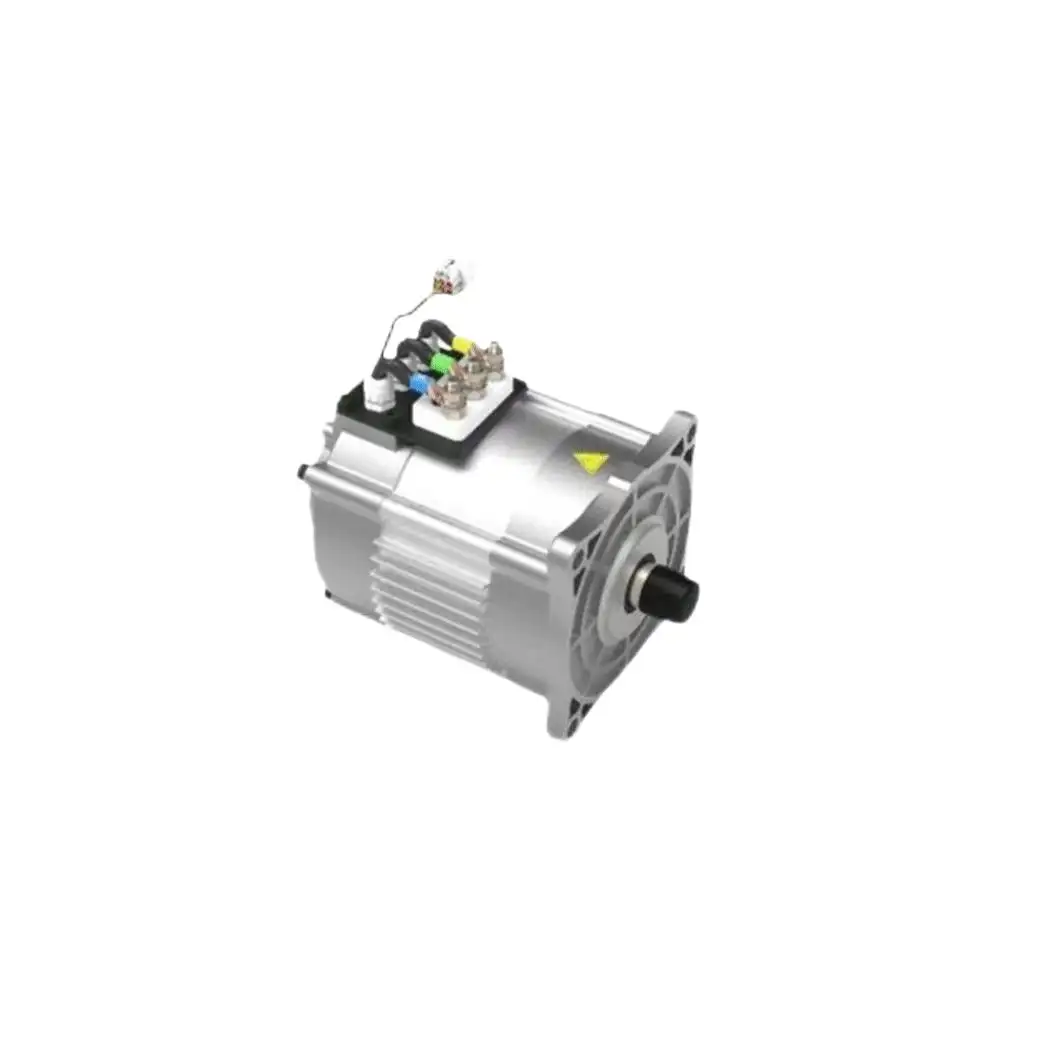
Двигатель хирургического робота
Двигатель хирургического робота является ключевым компонентом, обеспечивающим точность и маневренность роботизированных хирургических систем. Они используются для управления манипуляторами, камерами и другими инструментами, позволяя хирургам выполнять сложные операции с минимальной инвазивностью.
Введение в двигатели хирургических роботов
Хирургические роботы произвели революцию в области медицины, предоставив хирургам беспрецедентный уровень контроля, точности и ловкости. В основе этих передовых систем лежат двигатели хирургических роботов, которые приводят в действие манипуляторы робота и другие инструменты. Эти двигатели должны соответствовать строгим требованиям к точности, надежности и безопасности.
Типы двигателей для хирургических роботов
Существует несколько типов двигателей, используемых в хирургических роботах, каждый из которых имеет свои уникальные преимущества и недостатки. Наиболее распространенные типы включают:
Серводвигатели
Серводвигатели – это двигатели замкнутого контура, которые обеспечивают точное управление положением, скоростью и крутящим моментом. Они широко используются в хирургических роботах благодаря своей высокой точности и отзывчивости. Они обычно состоят из двигателя постоянного тока, датчика обратной связи (например, энкодера) и контроллера. Двигатели хирургического робота, серводвигатели, обеспечивают плавные и контролируемые движения, необходимые для сложных хирургических процедур.
Шаговые двигатели
Шаговые двигатели – это двигатели открытого контура, которые перемещаются дискретными шагами. Они известны своей точностью и способностью удерживать положение без питания. Шаговые двигатели часто используются в хирургических роботах для приложений, где требуется точное позиционирование, таких как управление камерой или перемещение инструментов. ООО Шэньчжэнь Яцзя Мотор (https://www.hhmotor.ru/) предлагает широкий спектр шаговых двигателей, подходящих для различных роботизированных применений.
Пьезоэлектрические двигатели
Пьезоэлектрические двигатели используют пьезоэлектрический эффект для создания движения. Они очень маленькие, точные и могут генерировать большие силы. Пьезоэлектрические двигатели все чаще используются в хирургических роботах для микрохирургических применений, где требуются высокая точность и минимальный размер.
Ключевые характеристики двигателей для хирургических роботов
При выборе двигателя для хирургического робота необходимо учитывать несколько ключевых характеристик:
- Точность: Двигатель должен обеспечивать точное управление положением, скоростью и крутящим моментом.
- Надежность: Двигатель должен быть надежным и способным выдерживать повторные циклы работы.
- Размер и вес: Двигатель должен быть достаточно маленьким и легким, чтобы его можно было интегрировать в роботизированную систему.
- Безопасность: Двигатель должен соответствовать строгим стандартам безопасности для предотвращения травм пациентов и персонала.
- Управление: Двигатель должен легко интегрироваться с системой управления роботом для обеспечения точной координации движений.
Применение двигателей хирургических роботов
Двигатели хирургических роботов используются в широком спектре хирургических процедур, включая:
- Лапароскопическая хирургия: Минимально инвазивная хирургия, выполняемая через небольшие разрезы.
- Роботизированная хирургия сердца: Операции на сердце, выполняемые с использованием роботизированных систем.
- Нейрохирургия: Операции на мозге и нервной системе.
- Ортопедическая хирургия: Операции на костях и суставах.
- Урология: Операции на мочеполовой системе.
Преимущества использования двигателей хирургических роботов
Использование двигателей хирургических роботов имеет множество преимуществ как для хирургов, так и для пациентов:
- Повышенная точность и ловкость: Роботы могут выполнять сложные операции с большей точностью и ловкостью, чем человек.
- Минимальная инвазивность: Роботизированная хирургия позволяет выполнять операции через небольшие разрезы, что приводит к меньшему количеству боли, кровопотери и времени восстановления.
- Улучшенная визуализация: Роботы могут обеспечивать трехмерную визуализацию операционного поля, что позволяет хирургам лучше видеть и маневрировать.
- Уменьшение усталости хирурга: Роботы могут помочь снизить усталость хирурга во время длительных операций.
- Улучшенные результаты для пациентов: Роботизированная хирургия может привести к улучшению результатов для пациентов, таких как снижение риска осложнений, более короткое время пребывания в больнице и более быстрое восстановление.
Выбор правильного двигателя для хирургического робота
Выбор правильного двигателя для хирургического робота – это критически важное решение, которое может повлиять на производительность и безопасность роботизированной системы. При выборе двигателя необходимо учитывать множество факторов, включая тип приложения, требования к точности, размер и вес, а также бюджет. Рекомендуется проконсультироваться с экспертами, такими как специалисты ООО Шэньчжэнь Яцзя Мотор, чтобы получить рекомендации по выбору оптимального двигателя.
Будущее двигателей хирургических роботов
Технология двигателей хирургических роботов постоянно развивается. В будущем мы можем ожидать увидеть еще более точные, надежные и компактные двигатели. Новые материалы и конструкции двигателей, такие как пьезоэлектрические двигатели и микро-двигатели, могут произвести революцию в хирургической робототехнике, позволив выполнять еще более сложные и минимально инвазивные операции.
Сравнение типов двигателей для хирургических роботов
В следующей таблице представлено сравнение различных типов двигателей, используемых в хирургических роботах:
| Тип двигателя | Преимущества | Недостатки | Применение |
|---|---|---|---|
| Серводвигатели | Высокая точность, отзывчивость, управление замкнутым контуром | Более высокая стоимость, более сложная конструкция | Управление манипуляторами, сложная хирургия |
| Шаговые двигатели | Точное позиционирование, удержание положения без питания, простота управления | Меньшая скорость, меньший крутящий момент | Управление камерой, перемещение инструментов |
| Пьезоэлектрические двигатели | Очень маленький размер, высокая точность, большая сила | Высокая стоимость, ограниченный диапазон перемещения | Микрохирургия, наноробототехника |
Заключение
Двигатели хирургических роботов играют жизненно важную роль в обеспечении точности, надежности и безопасности роботизированных хирургических систем. Выбор правильного типа двигателя зависит от конкретных требований приложения. С развитием технологий, двигатели хирургических роботов будут продолжать развиваться, открывая новые возможности для улучшения хирургических процедур и результатов для пациентов.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
 Высокоскоростной малошумный двигатель 12 В постоянного тока переменного тока 4420 для двигателя машины для производства мороженого
Высокоскоростной малошумный двигатель 12 В постоянного тока переменного тока 4420 для двигателя машины для производства мороженого -
 OEM ODM постоянный магнит высокоскоростной щеточный двигатель постоянного тока
OEM ODM постоянный магнит высокоскоростной щеточный двигатель постоянного тока -
 Мини 5 В постоянного тока плоский редукторный двигатель для электрического рекламного светового короба с низким уровнем шума
Мини 5 В постоянного тока плоский редукторный двигатель для электрического рекламного светового короба с низким уровнем шума -
 32-миллиметровый редуктор постоянного тока, бесщеточный электронный дверной замок, электрический редукторный двигатель
32-миллиметровый редуктор постоянного тока, бесщеточный электронный дверной замок, электрический редукторный двигатель -
 12 В 10 Нм медицинский электрический хирургический степлер с постоянным магнитом DC щеточный двигатель
12 В 10 Нм медицинский электрический хирургический степлер с постоянным магнитом DC щеточный двигатель -
 3000W36V высокоэффективный двигатель постоянного тока 138 с постоянными магнитами, бесщеточный двигатель
3000W36V высокоэффективный двигатель постоянного тока 138 с постоянными магнитами, бесщеточный двигатель -
 Педальный мотор
Педальный мотор -
 Нож медицинский 3670 постоянный магнит постоянный электрический без сердечника бесщеточный двигатель
Нож медицинский 3670 постоянный магнит постоянный электрический без сердечника бесщеточный двигатель -
 36 Полый стакан электродвигатель
36 Полый стакан электродвигатель -
 Высокоэффективный 4000-5000 Вт 150-200 А электрический трехколесный велосипед с индивидуальным двигателем DC 155
Высокоэффективный 4000-5000 Вт 150-200 А электрический трехколесный велосипед с индивидуальным двигателем DC 155 -
 Производитель Direct Поддержка настраиваемых 28mm 2835 пустых стаканов бесщеточный двигатель
Производитель Direct Поддержка настраиваемых 28mm 2835 пустых стаканов бесщеточный двигатель -
 Графитовый постоянный магнит 30 мм IP54 угольная щетка постоянного тока без сердечника двигатель для беспилотного робота
Графитовый постоянный магнит 30 мм IP54 угольная щетка постоянного тока без сердечника двигатель для беспилотного робота
Связанный поиск
Связанный поиск- бесщеточный двигатель купить
- бесщеточный двигатель для пилы
- Мотор-редуктор стеклоочистителя Цена в Китае
- Купить Двигатель для моделирования
- Купить серводвигатель управления
- Купить мотор-редуктор скорость
- Имитационный двигатель
- Производитель планетарных мотор-редукторов
- Производители систем управления серводвигателями
- Купить двигатель сервисного робота